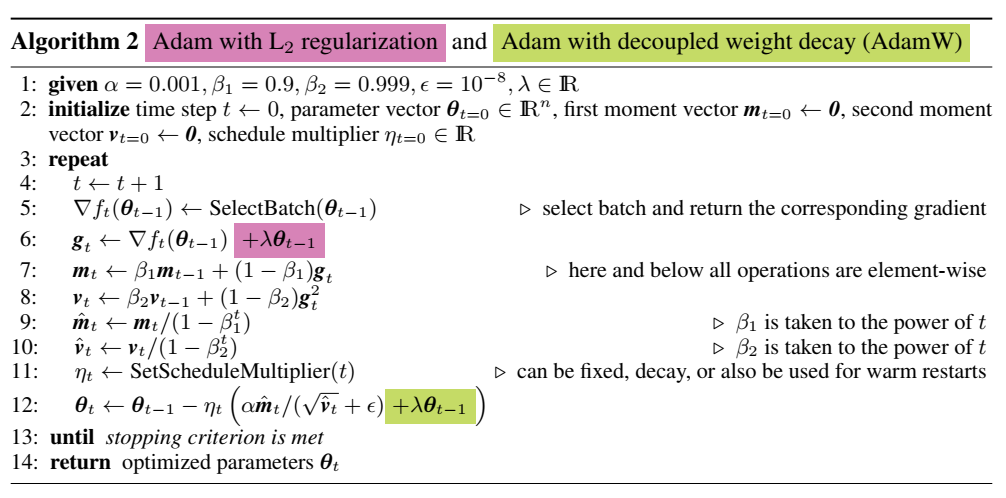
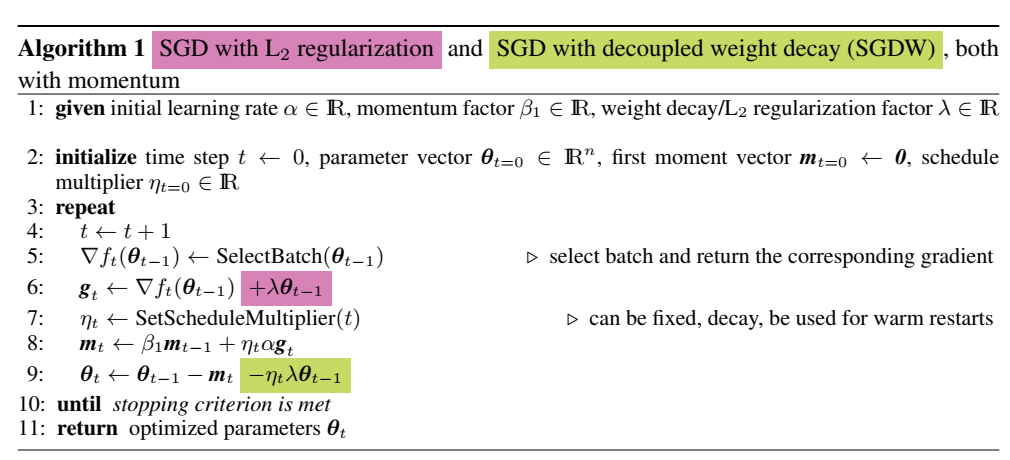
优化的目标是希望找到一组模型参数,使模型在所有训练数据上的平均损失最小。对于参数的迭代更新\( heta \leftarrow heta -\eta g\),主要是从两个方面,一个是梯度修正\(g\),一个是学习率\(\eta\)调整。基本都是基于历史的梯度或者学习率进行一个调整。 用单个训练样本的损失来近似平均损失,即每次随机采样一个样本来估计当前梯度,对模型参数进行一次更新。 优点:训练速度快,内存开销小。 缺点:SGD每步接受的信息有限,对梯度的估计准确性低,造成目标函数的收敛不稳定伴有震荡甚至出现不收敛。随机性大,并不保证全局最优化。 动量方法考虑了带衰减系数的前一步伐,可以加速SGD,抑制震荡。 优点:比SGD收敛更快,目标函数的收敛更稳定,减少在鞍点等的震荡。 缺点:保持惯性,缺乏适应性。梯度方向不变的维度上速度变快,梯度方向有所改变的维度上的更新速度变慢 。 在SGD+Momentum上增加“提前量”设计,在计算梯度时做了调整,用\( heta_t-\beta_1 m_{t-1}\)来近似当作参数下一步会变成的值,计算未来可能位置处的梯度而非当前位置的梯度。 优点:改进Momentum方法,防止按照惯性走的太快,会衡量一下梯度做出修正。 自适应地确定参数的学习速度,对更新频率低的参数做较大的更新,对更新频率高的参数做较小的更新。采用“历史梯度平方和”来衡量不同参数的梯度的稀疏性,取值越小表明越稀疏。 优点:减少学习率的手动调整,更适用于稀疏数据,提高SGD的鲁棒性。 缺点:分母会不断累积,学习率衰减越来越快。 是 Geoff Hinton 提出的一种自适应学习率方法。结合了Momentum的惯性原则,加上AdaGrad对错误方向的阻力。但是缺少了Momentum的一部分,因此后面Adam补上这个想法。 RMSprop 和 AdaDelta 都是为了解决 AdaGrad 学习率急剧下降问题的。 优点:解决 AdaGrad 学习率急剧下降。 针对AdaGrad改进:因为AdaGrad采用所有历史梯度平方和的平方根做分母,分母随时间单调递增,产生的自适应学习速率随时间衰减的速度过于激进 。AdaDelta 采用指数衰减平均的计算方法,用过去梯度平方的衰减平均值代替他们的求和。 这个分母相当于梯度的均方根 root mean squared (RMS),在数据统计分析中,将所有值平方求和,求其均值,再开平方,就得到均方根值。 优点:不需要提取设定学习速率,使用指数衰减平均计算,防止学习速率衰减过快。 结合Momentum和AdaGrad的优点,即考虑过去梯度的平方的指数衰减平均值,也保持过去梯度的指数衰减平均值。还包含了偏置修正,修正从0初始化的一阶矩和二阶矩的估计。 优点:为不同参数产生自适应的学习速率。 Adamax优化器来自于Adam的论文的Section7,该方法是基于无穷范数的Adam方法的变体,对梯度平方的处理由指数衰减平均改为指数衰减求最大值。在Adam中,单个权重的更新规则是将其梯度与当前和过去梯度的\(L^2\)范数(标量)成反比例缩放。作者又将基于\(L^2\)范数的更新规则泛化到基于\(L^p\)范数的更新规则中。 虽然这样的变体会因为\(p\)的值较大而在数值上变得不稳定,但是在特例中,令\(p\rightarrow\infty\)会得出一个极其稳定和简单的算法。 由于\(u_t\)依赖于max操作,所以AdaMax不像在Adam中\(m_t\)和\(v_t\)的偏差趋向于0,所以不需要计算\(u_t\)的偏差校正(\(u_0=0\))。 在Ilya Loshchilov & Frank Hutter 的论文Decoupled weight decay regularization中,把Adam中的权重衰减和基于损失的梯度更新解耦(AdamW)。发现在Adam这种自适应学习率算法中L2正则化不像在SGD中有效: 而在常见的深度学习库中只提供了L2正则,并没有提供权重衰减的实现。这可能就是导致Adam跑出来的很多效果相对SGD with Momentum有偏差的一个原因。大部分的模型都会有L2 regularization约束项,因此很有可能出现Adam的最终效果没有SGD的好。目前bert训练采用的优化方法就是AdamW,对除了layernorm,bias项之外的模型参数做weight decay。 Adam的weight decay发生在紫字部分,所以由于\(g^2\)作分母,会使得大的梯度得不到足够力度的正则化;而AdamW把weight decay放在了绿字部分,所以能有效的正则化。 和AdamW类似,是SGD+momentum使用解耦的weight decay(SGDW)。原始的SGD+momentum权重衰减发生在梯度的L2正则化,而SGDW是在更新参数\( heta_t\)时使用解耦权重衰减。 偏置修正只是对训练的开始有用,先不考虑偏置修正。Adam中\(\frac{\eta}{\sqrt{{v_t}+\epsilon}}\)朝着平均梯度方向前进的步幅,随着训练会逐渐减少。由于学习率是恒定或递减的,作者提出的解决方法是通过添加另一个变量来跟踪梯度平方的指数衰减平均\(v_t\)的最大值,从而迫使\(v_t\)增加。 经典的优化问题中迭代法的一阶法(梯度下降法),前面SGD、Adam等都是在一阶法的基础上进行改进,加快收敛速率。二阶法(牛顿法)的收敛速度是远快于一阶法的,但是Hessian矩阵求逆的计算复杂度很大,对于目标函数非凸时,二阶法有可能会收敛到鞍点。针对二阶法的这个问题,提出了BFGS算法,再是低存储的L-BFGS算法。简答说L-BFGS和梯度下降、SGD干的同样的事情。 牛顿法求根\(f(x)=0\)的思路: 对于机器学习中的最优化问题,大部分要优化的是目标函数的导函数,即求导函数为0的点(驻点)。用牛顿法求导函数为0,转换迭代公式为:\(x_k=x_{k-1}-\frac{f‘(x_{k-1})}{f'’(x_{k-1})}\)。牛顿法求驻点本质是目标函数\(f(x)\)的二阶泰勒展开:\(f(x)\approx f(x_k)+f'(x_k)(x-x_k)+\frac{1}{2}f''(x_k)(x-x_k)^2\)。对目标函数求导即对近似式求导即\(f'(x_k)+f''(x_k)(x-x_k)=0\),变换后就是上面的迭代公式。 机器学习中优化的目标函数是多元的,\(x,f'(x)\)都是向量,\(f''(x)\)是Hessian矩阵,迭代公式变为下式,\(g_k\)就是\(f'(x_k)\),\(H^{-1}_k\)是二阶导数的倒数: 直接求\(H^{-1}_k\)很困难,因此提出BFGS算法:通过迭代法来逼近\(H^{-1}_k\)的算法。 其中\(D_k=H_k^{-1},s_k=x_{k+1}-x_k,y_k=g_{k+1}-g_k\)。 \(D_k\)的迭代公式也很复杂,利用单位矩阵(\(D_0=I\))逐步逼近\(H\)矩阵,每次计算要存储\(D\)矩阵。如果数据集维度很大,迭代所需要的存储巨大。 因为无法保存巨大的\(D\)矩阵,提出了L-BFGS算法: 时间换空间的方法:每次计算\(D\)矩阵要迭代计算\(s_k\)和\(y_k\),那存储所有的\(s_k\)和\(y_k\)就可以。如果要得到\(D_{10}\),用单位矩阵与存储的\(s_1,\dots,s_{10},y_1,\dots,y_{10}\)计算即可。如果数据集是10000维,存储大小为\(10000 imes 10000\)的\(D_k\),变成存储10个大小为\(1 imes 10000\)的向量\(s_k\)和\(y_k\),有效节省了内容空间。 如果迭代次数很大,内存同样会不足。设定最大的存储向量数\(N\),如果\(s_k\)和\(y_k\)迭代超过\(N\),就丢弃第一组\(s_1,y_1\),存储\(s_2,\dots, s_{N+1}, y_2,\dots, y_{N+1}\),每次丢弃最前边的\(s_k\)和\(y_k\)。虽然损失了精度,但可以保证使用有限的内存将函数的解通过BFGS算法求得到。 L-BFGS算法,可以看做是对BFGS算法的又一次近似。 优点:收敛速度快、内存开销少。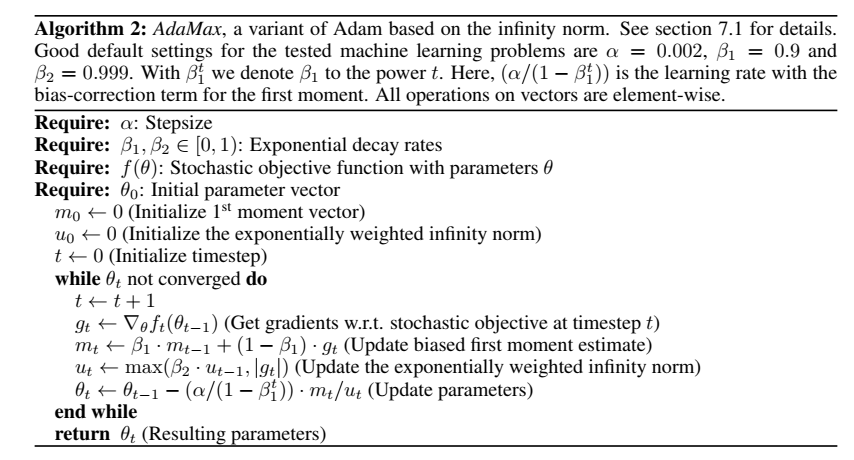
创客课程开发的每个主题课程需要基于现实情景,设置学习探究任务,通过问题研究、任务...
创客空间建设 能够给人们分享各种乐趣,通过电脑,技术,科学,艺术结合,设计创造一...
在了解创客教育之前,我们首先了解下何为创客。创客是一群喜欢或享受创新的人。创客跨...
STEAM教育是对传统教育的提升,它是基于自然学校方式的功能性框架,可以适合各类...